
Google の Voice Kit に興味を持ちマイコンに手を出してから早1年になろうとしています、年を重ねるごとに1年が早く過ぎ去りますね。
さて、倒立 Robot Car も今回で4台目になります、最初に作成したものはふらふらしながら立つのがやっとでしたが、何台か作成してきて多少なりともまともになってきたかなと。(自己満足(^_^;)
ESP Wroom32 を使用する
ユニバーサル基板にパーツを配置して作成していますので、今までの仕様だと小型化がなかなか難しく70mm×90mm の基盤が限度でしたので、フレームはこの大きさより小さく出来ませんでした。
ESP Wroom32 を使用するとWiFi部分が内蔵されていますので、残りは Motor_driver ・ Regulator・MPU6050 位ですので 50mm×70mm のユニバーサル基板に治まりそうです、今回はこの大きさで作成してみます。
使用パーツ
ESP Wroom32:ESP32-DevKitC ESP-WROOM-32開発ボード(秋月電子)
ステッパーモータードライバー:DRV8825(アマゾン)
ジャイロ:MPU6050(アマゾン)
5Vレギュレータ:三端子レギュレーター 5V1.5A L7805CV-DG (秋月電子)
電解コンデンサー:100μF セラミックコンデンサー:0.1μF(秋月電子)
抵抗器:1KΩ LED:青・赤 スイッチ (秋月電子)
ユニバーサル基板:50mm×70mm ピンヘッダー 分割ロングピンソケット (秋月電子)
ステッパーモーター:日本電産サーボ 2相 KH39FM2-022(オリジナルマインド)
車輪用Oリング:太さ5.7mm×内径59.6mm (ものたろう)
フレーム:3Dプリンターで作成 カバー:0.5mm 塩ビ板
電池:3S11.1V450mAリポ電池(KKホビー)
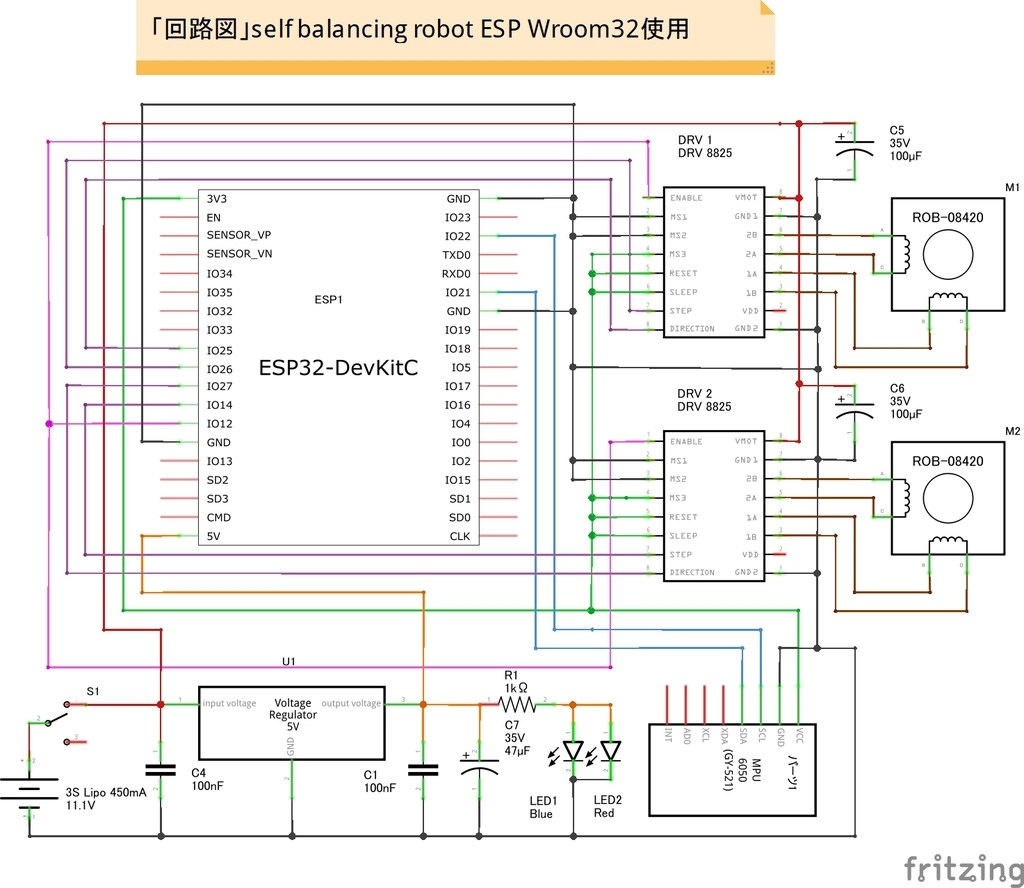
回路図
B-robot の forum に掲載されていたものを参考にしています。
スケッチ・ライブラリーなどはGitHub からダウンロードして使用します、使い方は Readme.md に書かれています。
なお、forum にも書かれていますが Timers.cpp ファイルの一部修正が必要です。
基盤作成及び組み立て
50mm×70mmのユニバーサル基板にきれいに収まりました、配線の汚さには目をつぶって下さい。


フレーム及び車輪は3Dプリンターで作成しました。



塩ビのカバーをフレームの溝に入れて、車輪を取付け完成です。


ステッパーモーターのコネクターを外し、電源を入れた時に流れる電流は150mA位です、片方のステッパーモーターを取付けて流れる電流を230mA程度にモータードライバーを調整すると振動がなく調子よく動きました、オーバーパワーにするとモーターの振動が増加してガクガクします。
立たせてみました結構安定しています。
スマフォによるコントロール
手持ちのスマフォは Android ですが iPhone 用もあります、Google Play からJJrobots contro APP をダウンロードしインストールします。
スマフォのWiFi設定を開くと、一覧の中に bbot が表示されていますので選択、Passはディフォルトでは「12345678」です、IDとPassは変更可能ですがPassは8文字以上が仕様です、接続されたらAPPを起動B-robotを選択すればコントロールが可能になります。
動画です