
この所セルフバランシングロボットばかり作っているような感じですが、また作りました。。。(^_^;)
前回の改良版としてフレームの見直しとサーボの追加、ステッパーモーターを一般的なNEMA14に変更しました。
このセルフバランシングロボットはjjrobotsでオープンソースを公開しているBROBOT EVOを参考にしています、B-Robot forum に掲載されています「ghmartin77」さんの記事が大変参考になりました感謝です。
3Dプリンターで作成したフレーム
フレームはPLAフィラメントを使用しています、サーボ取付けやステッパーモーターの仕様変更により以前のものとは多少変更がありますが、大きさはほぼ同じです。 展開図と組み上がりのイメージです。
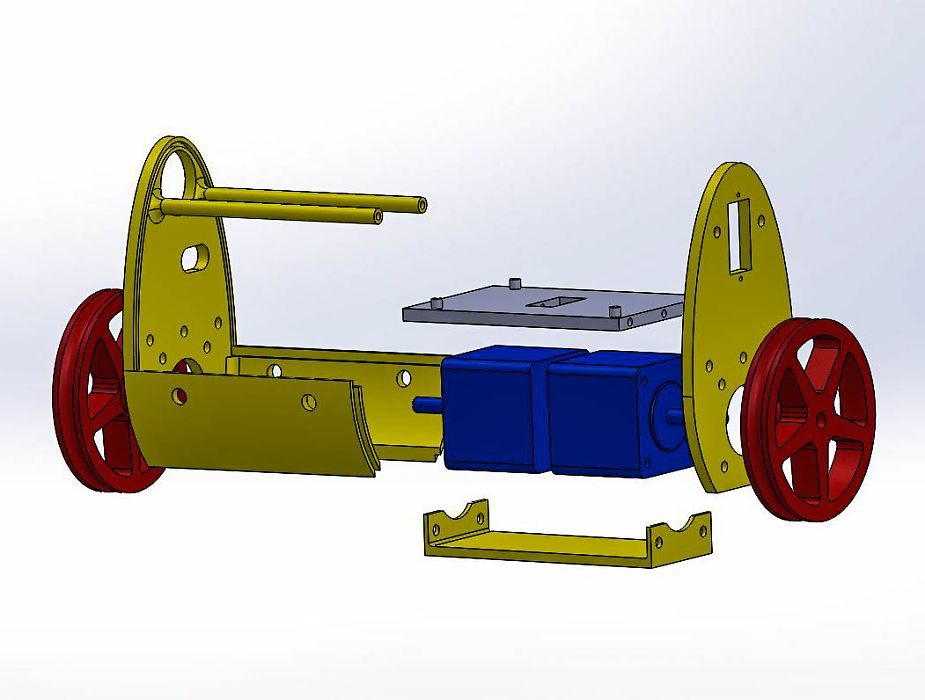

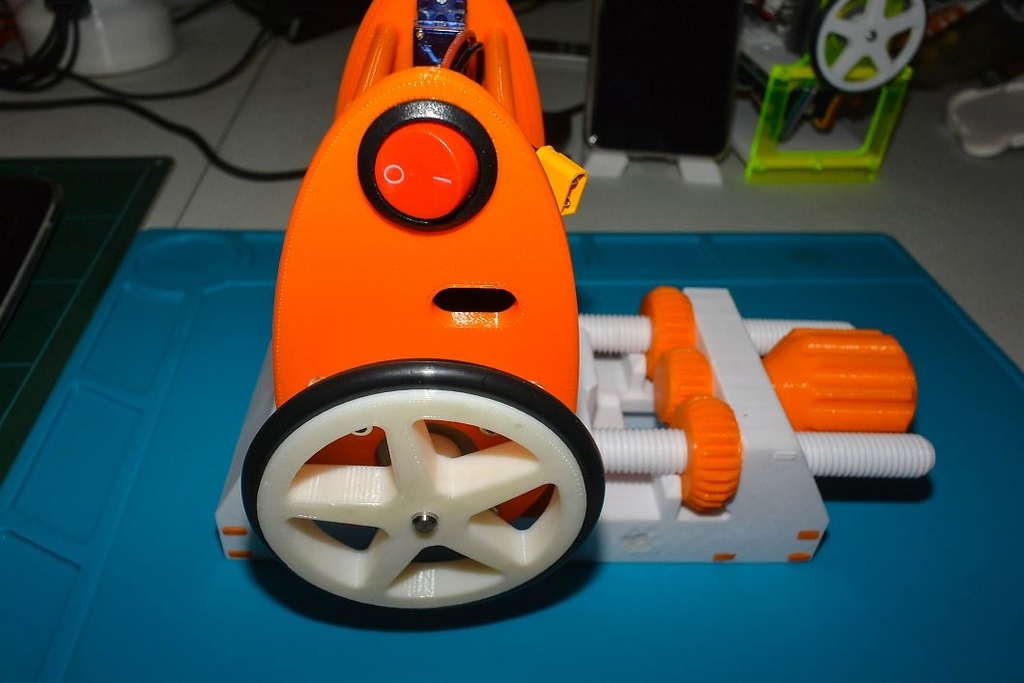
サーボに取付けるハンマーです、B-Robotが倒れたときの起き上がりにも使用します。
 STLファイルが必要な方は以下からダウンロードして下さい。
STL_ZIP_File
STLファイルが必要な方は以下からダウンロードして下さい。
STL_ZIP_File
主要パーツ
ステッパモーター・サーボ以外は、以前作成したB-Robotと殆ど変りはありませんのでそちらを参照して下さい、以下主要パーツのリンクを張っておきます。 ESP32-DevKitC ESP-WROOM-32開発ボード

ジャイロ:MPU6050

ステッパーモーターNEMA14

ステッパーモータードライバー:DRV8825

サーボ:MG90S

スイッチ:丸型スイッチ(アマゾン)
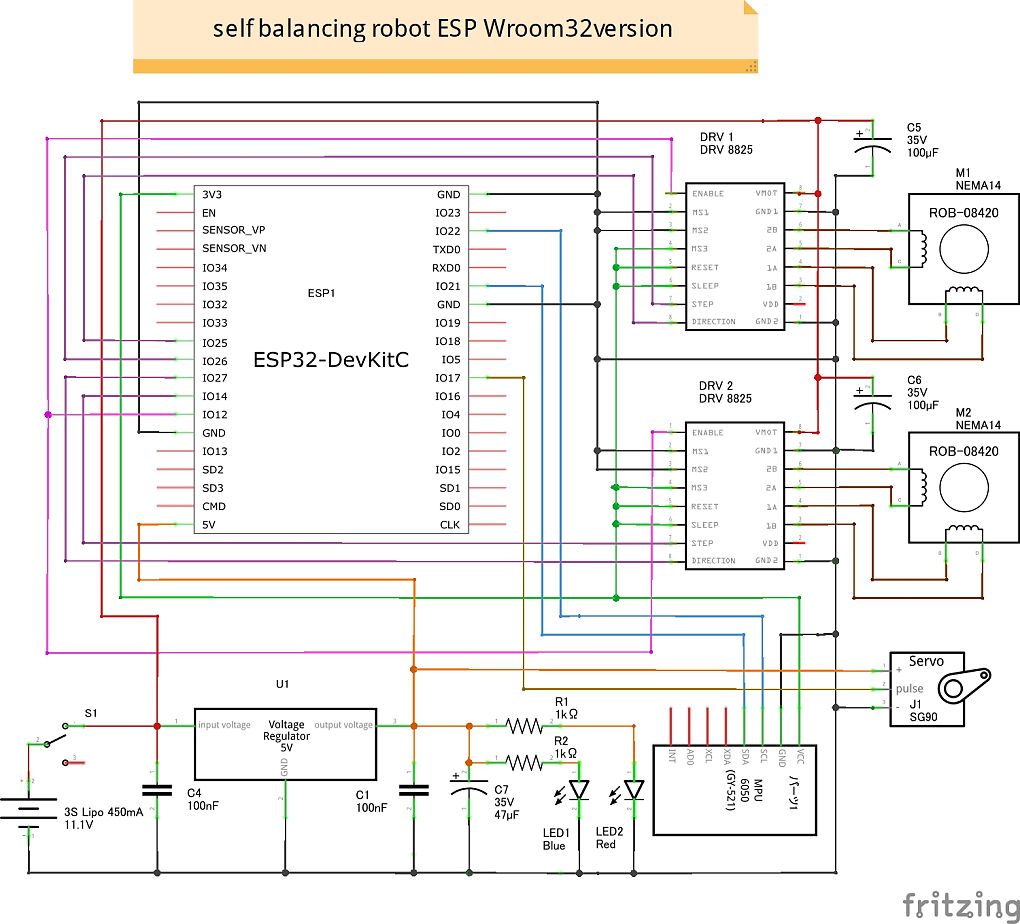
回路図
サーボを追加した回路図です。
基盤作成
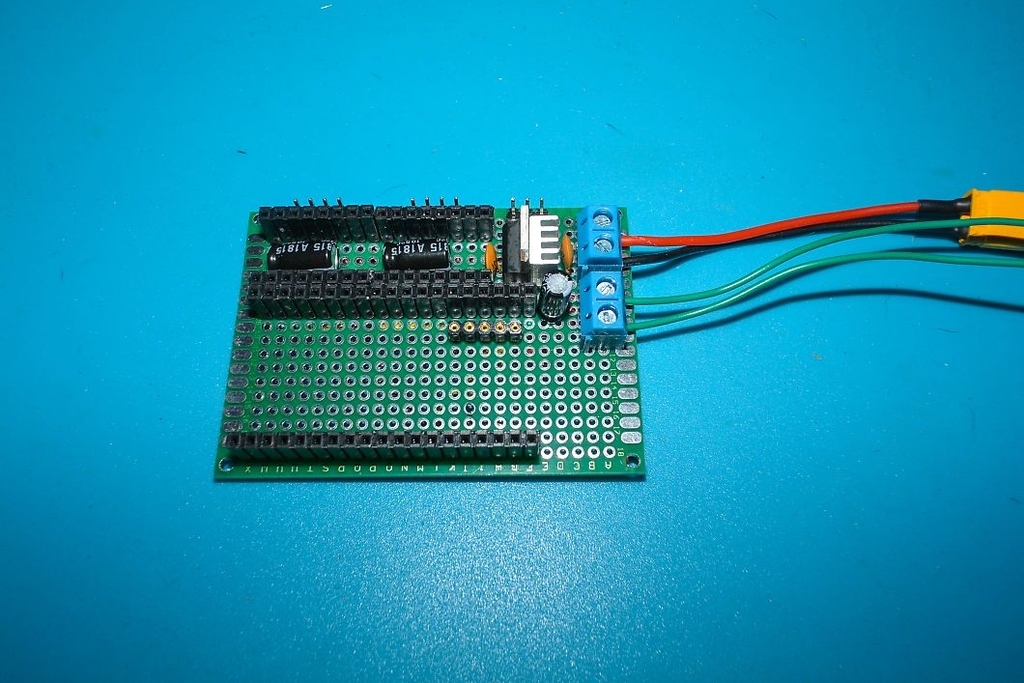
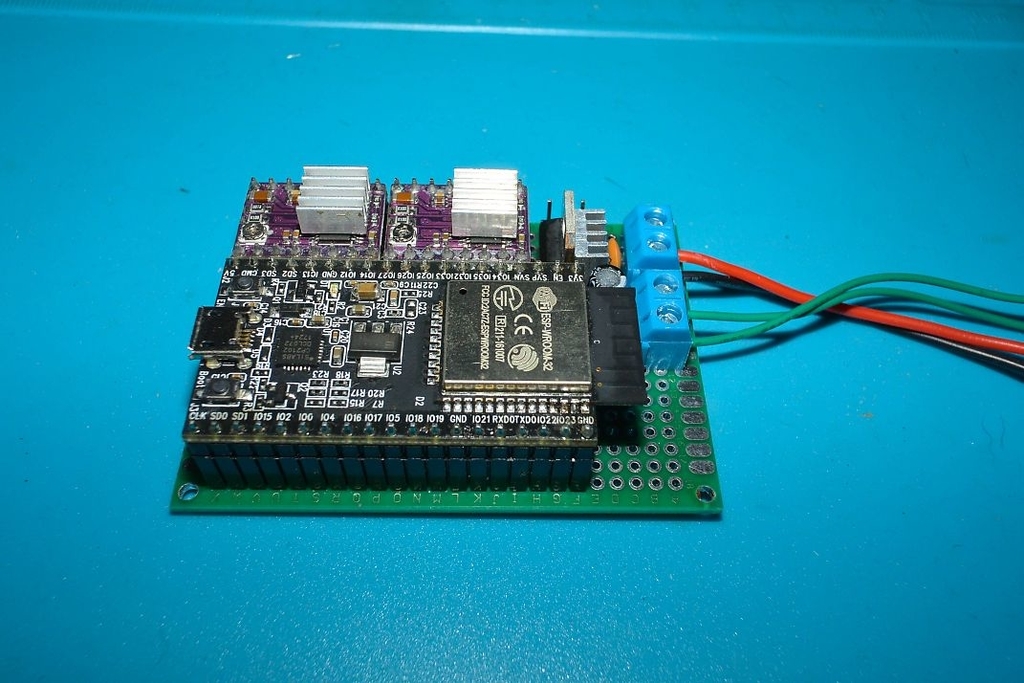
ユニバーサル基板は70mm×50mmを使用します。
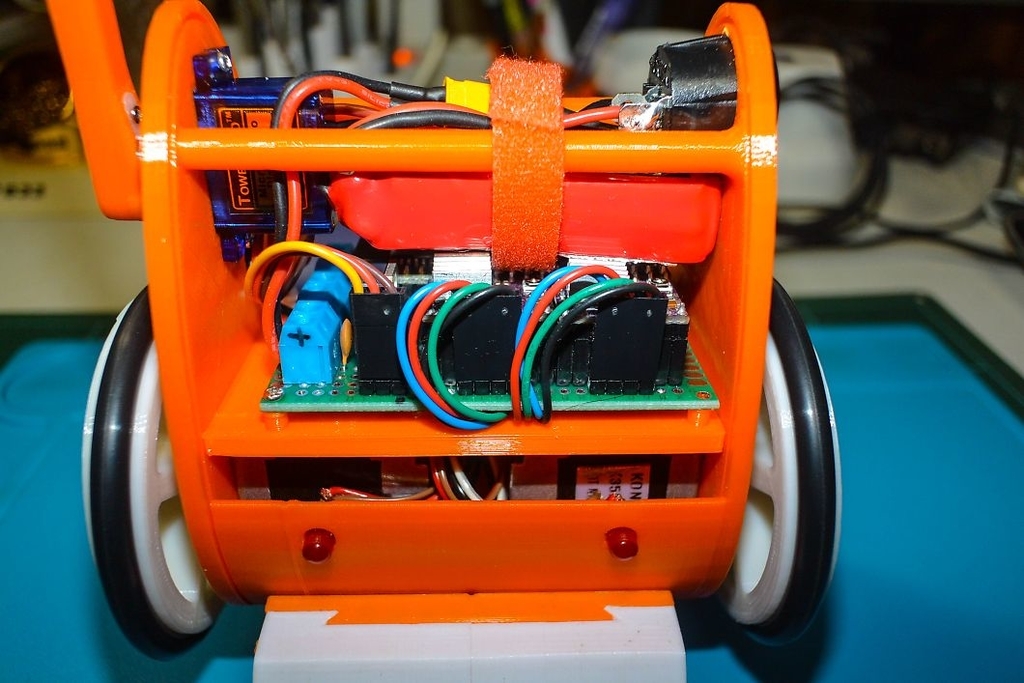
ESP32及びDRV8825用のピンヘッダー メスとステッパーモーター用及びサーボ用のピンヘッダーは画像のような配置になりました、短いピンヘッダー メスはMPU6050用でESP32の下に配置しています、5Vのレギュレータは結構熱くなりますのでヒートシンクを取付けています、その右側は電源及びスイッチ用のブロックコネクターです。
MPU6050はジンバルコントローラーに付属のものを流用しています、市販のMPU6050はピン数が異なります、また取付け方向に注意が必要です。
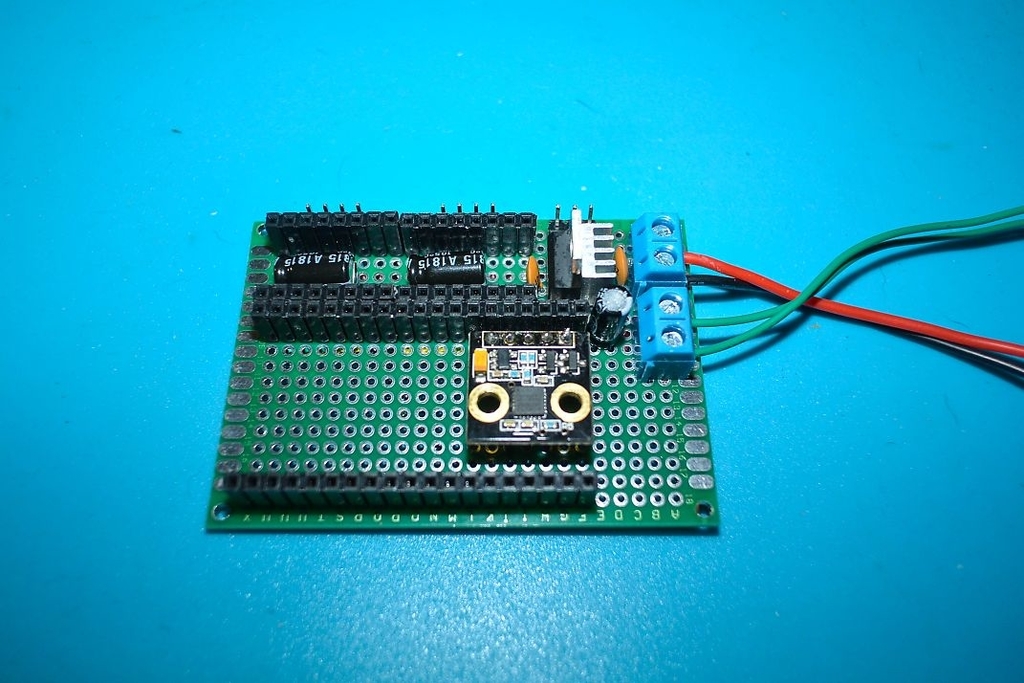 画像の手前が前進方向です、このMPU6050の場合はこの方向になりました、市販のMPU6050の場合は下の画像のようになります。
画像の手前が前進方向です、このMPU6050の場合はこの方向になりました、市販のMPU6050の場合は下の画像のようになります。
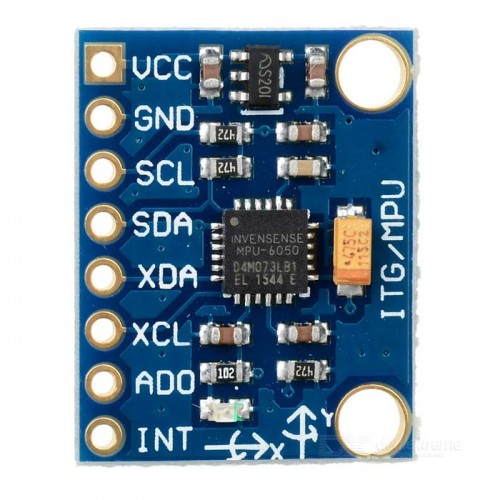
↓ 矢印の方向が前進
基盤の仕上がりです、しかしよく見たらLED用の抵抗1KΩ×2個を忘れてました、基盤の空いているところに取付け配線しました、ESP32だと部品数が少なくて済み配線も楽ですね。
組み立て
フレームの展開図を見れば分かると思います、基板用のプレートに基盤を2mmのタップネジで取付けます、ステッピングモーターは8mm×3mmのネジで固定します。
基板用プレートと側面フレームなどは3mmのタップを切りナイロンネジで固定します(タップがない場合は3mmのタップネジでもOK)
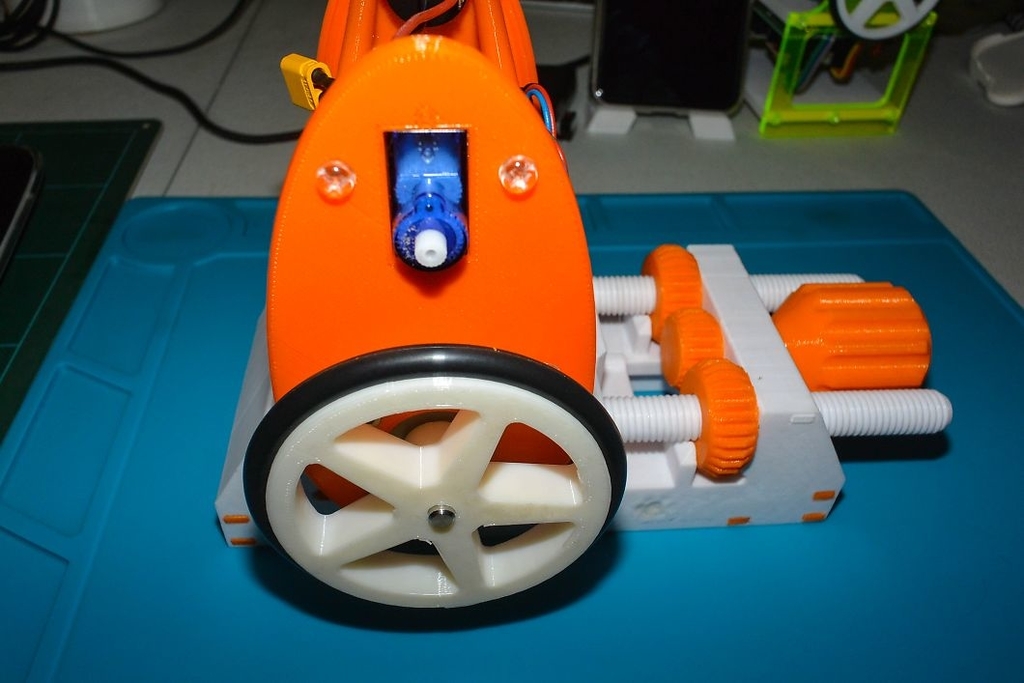
ホイールはOリングを取付けて、3mmのタップを切りイモネジでシャフトに固定します、サーボはSG90の場合裏側から2mmのタップネジで固定、MG90Sの場合表側からサーボを差し込みタップネジで固定します、スイッチは押し込みます。
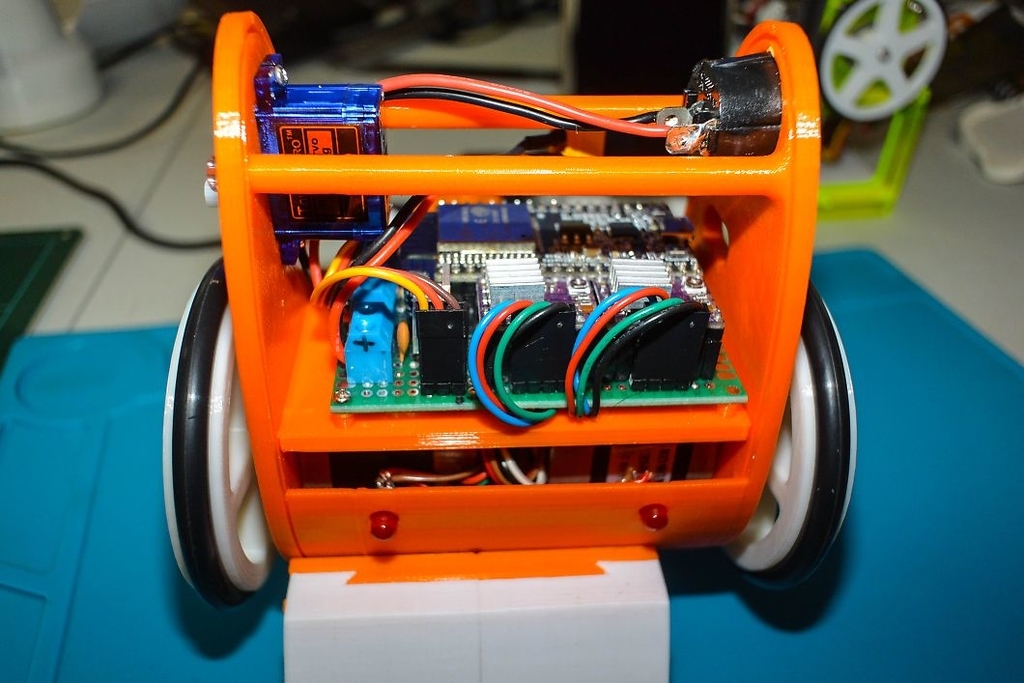
電池は画像のようにベルクロでフレームに固定します、ちなみにコネクターは左側から、サーボ・左モーター/右モーターの順になります(車体の後ろから見た状態)
フレームカバーは0.5mmの塩ビ板を83mm×160mmにカットしたものをフレームの溝にはめ込みます、シールのプリント用紙にイラストを印刷し貼り付けました。


次回はソフトウエア-のインストールです。