

以前作成したロボカーは、電源を入れると自分勝手に動き回るだけでコントロールする事が出来ません。
リモコンを使って動かしたい
リモコンも、WiFi・Bluetooth ・赤外線リモコン、などいろいろありますが今回は赤外線リモコンを使用してコントロールしたいと思います。
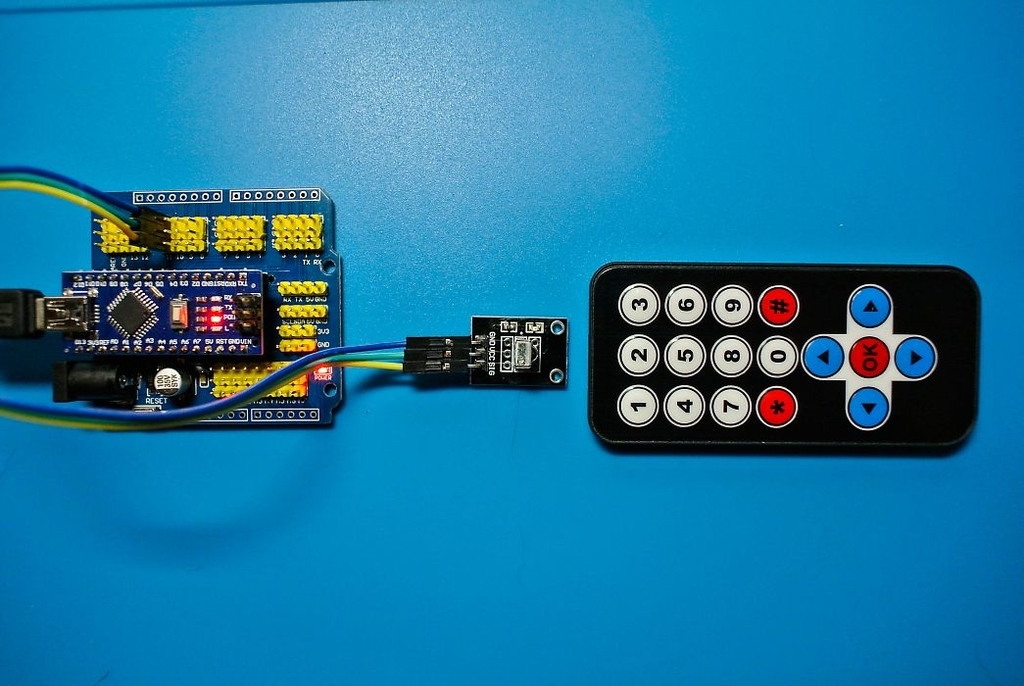
リモコンは以前BGでポチってあったものを使用します、実は矢印キーが上で数字キーが下のものをチョイスしましたが送られてきたのは逆の配列でした、さすがチャイナ。
アマゾンにもあります。

リモコンの信号コードを調べる
赤外線リモコンでコントロールする場合、リモコンから出る信号を把握する必要があります。
※これ以降の作業はここを参考に進めていきます。
Arduino NANO を使用しリモコン信号を解析します、ブレッドボードでもよいですが今回は 「Aruduino NANO UNO 用328P多機能拡張ボード」を使用しました、これ結構使いやすいです、画像は拡張ボードにArduino NANOを差し込み配線したものです。
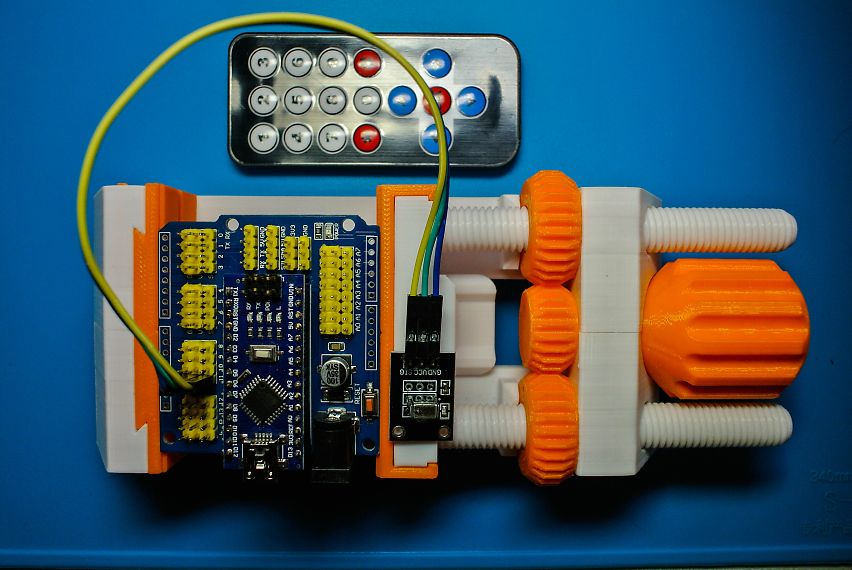
配線は簡単で、赤外線受信モジュールに3本の端子(Vcc Gnd Sgn)がありますのでそれぞれArduino の5V Gnd とSgn をこの場合11端子に接続するだけです。
スケッチの書き込み
まずIRRIMOTEライブラリーをArduino IDE にインストールします、次に以下のスケッチを書き込みます。
#include <IRremote.h> int RECV_PIN = 11; IRrecv irrecv(RECV_PIN); decode_results results; void setup() { Serial.begin(9600); irrecv.enableIRIn(); // Start the receiver } void loop() { if (irrecv.decode(&results)) { Serial.println(results.value, HEX); irrecv.resume(); // Receive the next value } }
リモコンのコードを表示させる
書き込みが終了したらリモコンコードをシリアルモニターに表示させます、画像のようにリモコンと受信モジュールを配置しArduinoIDEのシリアルモニターを立ち上げ、ボーレートを9600bpsに設定します。
そしてリモコンのボタン順に押していくと、下の画像のようにシリアルモニターにコードが表示されます、FFFFFFFFはリピートコードでボタンを長く押すと出ます。
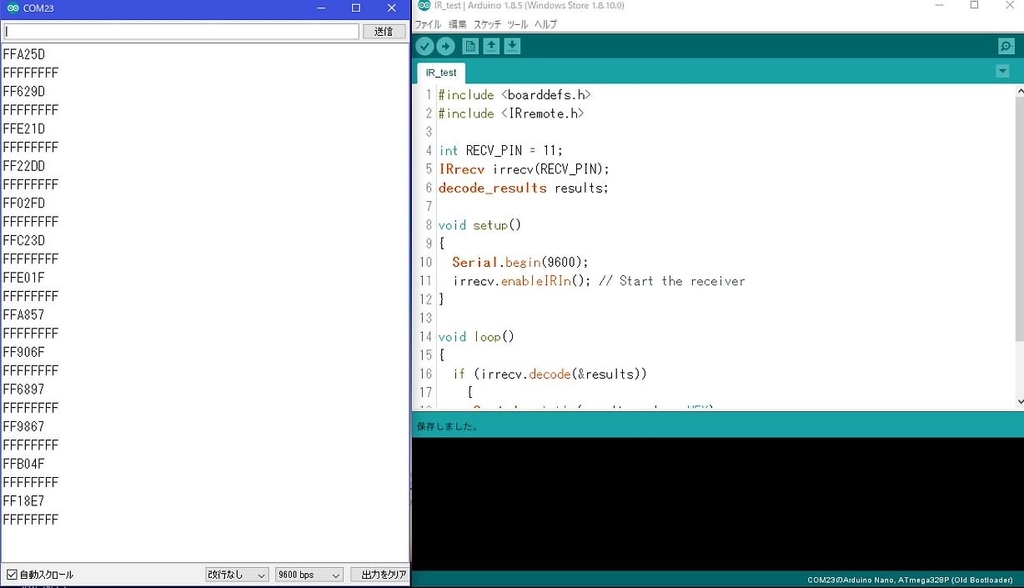
上部の「FFA25D」がリモコンボタンの「1」を押したときのコードです。
全部のボタンを順に押していき、対応するコードを書き留めておきます、リモコンと受信モジュールの位置が微妙にずれるとコードが変化しますので注意が必要です。
テレビのリモコンなど赤外線リモコンもこのやり方でコードを取得出来ますので、テレビのリモコンなどでロボカーをコントロール出来ますね。