
Voice Kit がらみでマイコンに手を染めてから面白さにはまりました。
比較的分かりやすい Arduino を使用してソナーを使ったRobot Car などを作成して楽しんでおります。
今回は Balancing Robot Car に挑戦してみます、難解な PID の設定などありますので上手くいくかどうか心配ですがとりあえず挑戦します。
使用パーツ
3端子レギュレーター NJM7809_9V1A:Arduino 電源用 (秋月電子通商)
NJM2396F63_6.3V1.5A:モーター駆動用 (秋月電子通商)
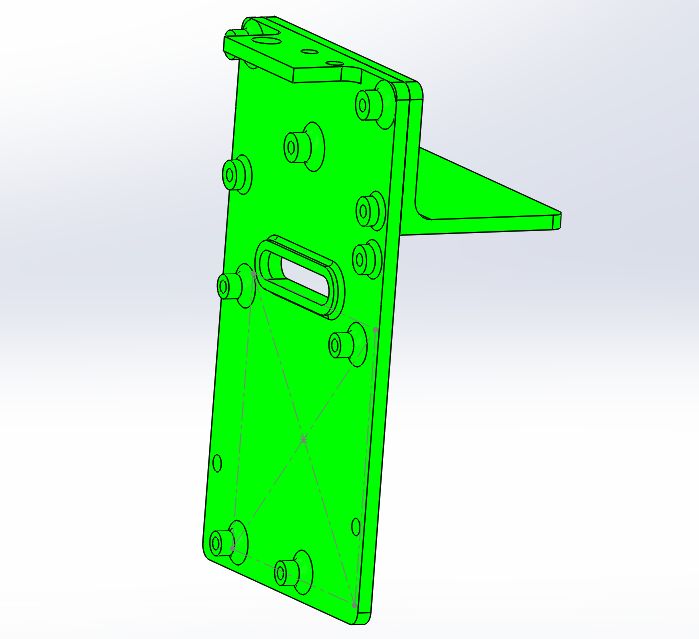
配線用ワイヤー・ヒートシンク フレーム(3Dプリンタで作成)など
Balancing Robot Car の組み立て
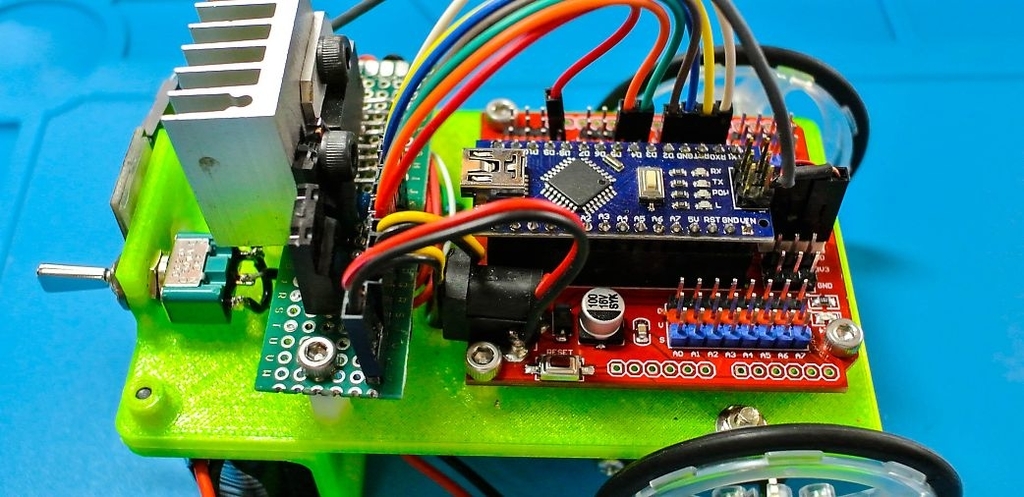
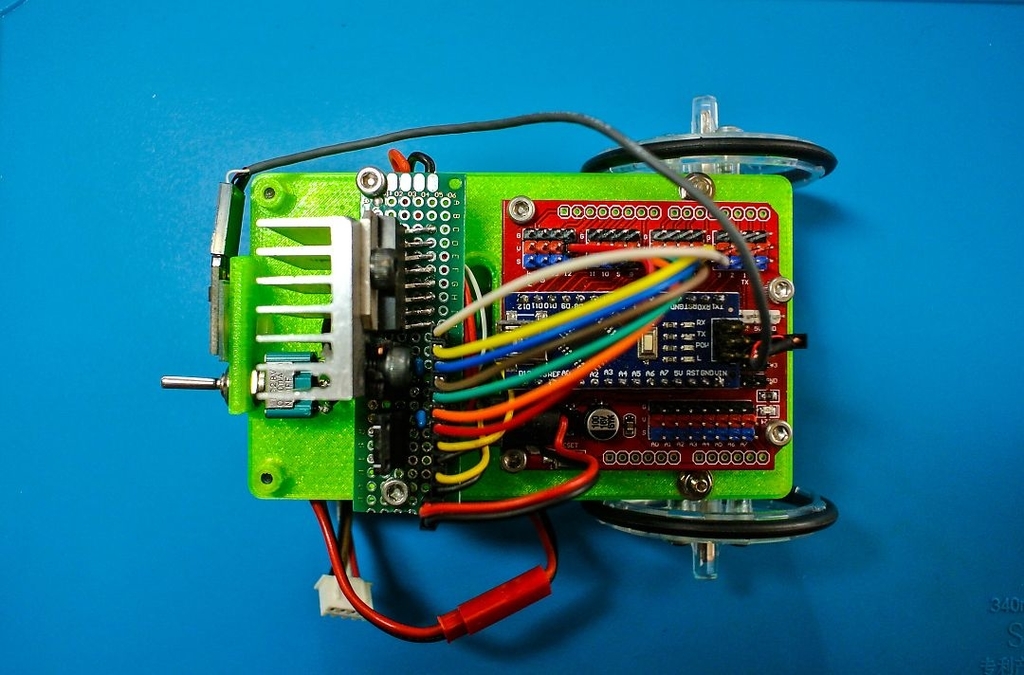
フレームは3Dプリンターで作成、モータードライバー及びレギュレーターは当初フレームに直付けしましたが、端子間がショートしそうなのでユニバーサル基板に配置しフレームに取付けました。
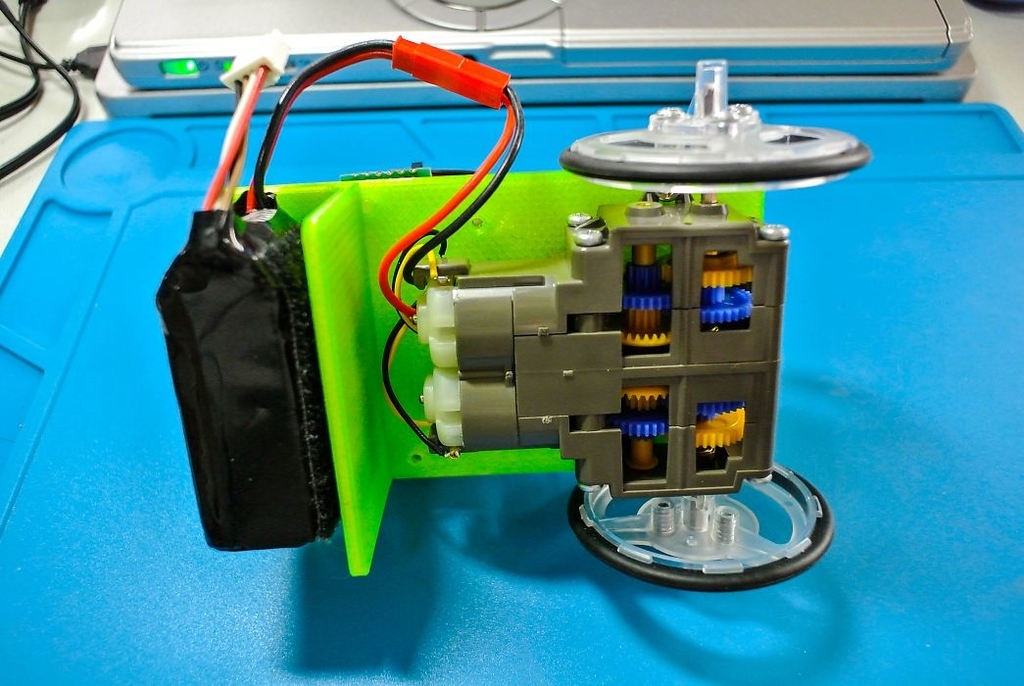
3セル11.1Vのリポバッテリーを使用しましたので、モーターの電源供給用に6VのレギュレーターとArduino電源用の9Vレギュレータを使用しています。
またレギュレーター及びモータードライバーが発熱しますので、手持ちのヒートシンクを加工して取付けました。
3軸ジャイロスコープのMPU6050はジンバルに使用していた物を流用しました。

動作確認
当初3軸ジャイロスコープの取付け方向の勘違いで全然立たなく、試しにジャイロスコープを外し手に持って試したところ、取付け位置が右に90度ズレていることが判明、左に90度戻し取付けてなんとか立つようになりました。
しかし、電源を入れる前に上手くバランスを取った上で電源を入れないと立ってくれません、まだまだ調整が必要ですね。
フラフラしながらもバランスを取っているところの動画です、なぜか右に回り始めます、左右のモーターのミスマッチなのか他に原因があるのか今のところ分かりません。