
jjrobotsで販売されているロボットコントロールボードの Devia Robotics Control board v1.0 を使用して倒立振り子ロボットを作成してみます。
以前の記事でも B-Robot 作成記事をいくつか投稿しました、jjrobots さんのオープンソース のおかげで楽しませて頂きましたので、感謝の気持ちとして今回コントロールボードを購入しました。
使用パーツ
これまでの B-Robot は小型のステッパーモーターを使用しましたが、今回は NEMA17 と同じくらいの大きさの中古ステッパモーター を使用します、したがってフレームの大きさも以前のものより大きくなりました。
ステッパーモーター中古(OKI ステッピングモータ KHP42J2501)
コントロールボード(Devia Robotics Control board v1.0)
ステッパーモータードライバー(A4988)
![HiLetgo 5個セットRepRap A4988 ステッピングモータドライバモジュール HR4988 3Dプリンター 交換チップ [並行輸入品]](https://m.media-amazon.com/images/I/51baq9WGwbL._SL500_.jpg "HiLetgo 5個セットRepRap A4988 ステッピングモータドライバモジュール HR4988 3Dプリンター 交換チップ [並行輸入品]")
マイクロサーボ(MG90S or MG90D)

丸型スイッチ
5 Pcs SPST黒いボタンオン/オフ丸いロッカースイッチAC 6A/125V 3A/250V")
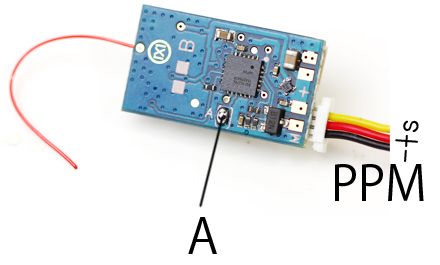
受信機、フタバのプロポでコントロールするため「Mini Futaba S-FHSS Compatible 8CH Receiver PPM」
マイクロクワッド用にポチっておいた物、今は販売されていないのかな?
PPMが使える受信機が必要です。
プロポは手持ちの14SGを使用します
 00008408-1")
Oリング 内径80mm太さ5mm 車輪に使用
リポ電池 3S 11.1V 1500mAh 厚さ20mm以下の物 KyPom がお勧め

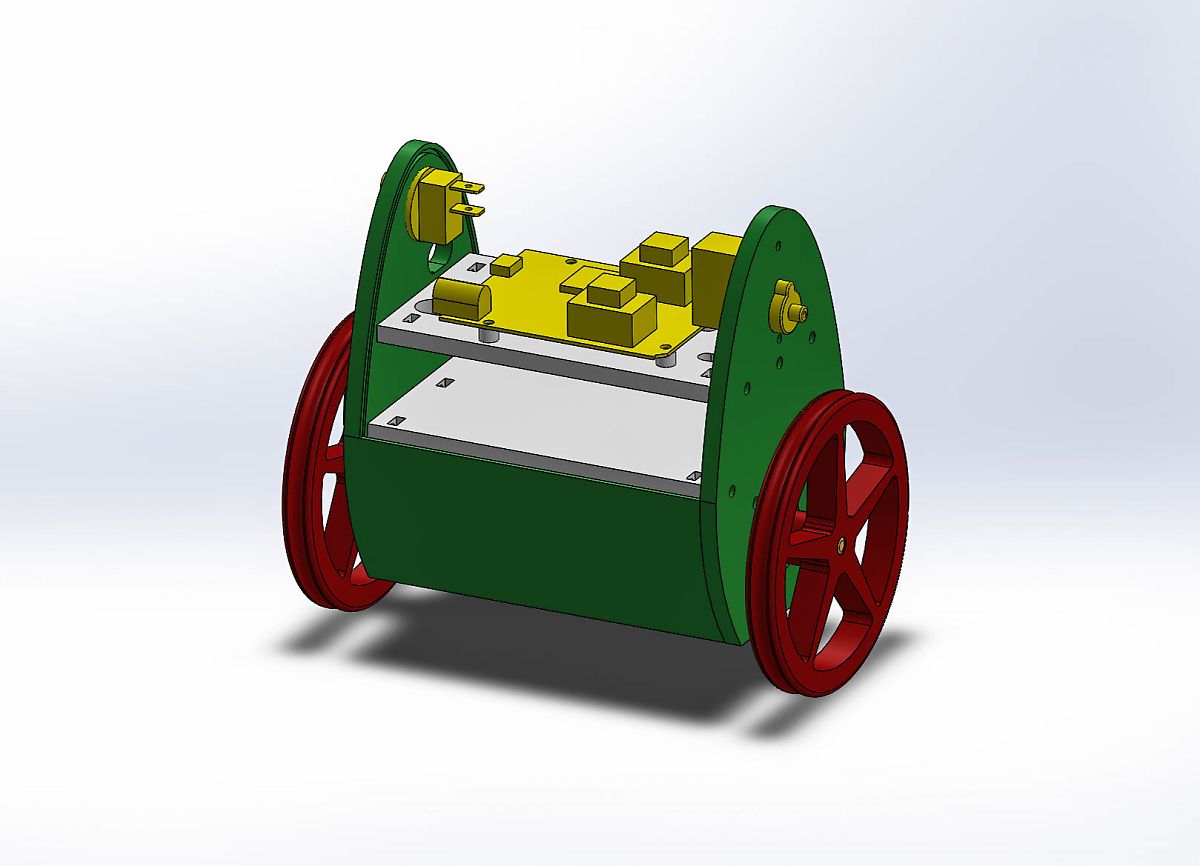
フレームの作成
以前作成した物と同じような形状で、大きさが増しただけですが(^_^;)。
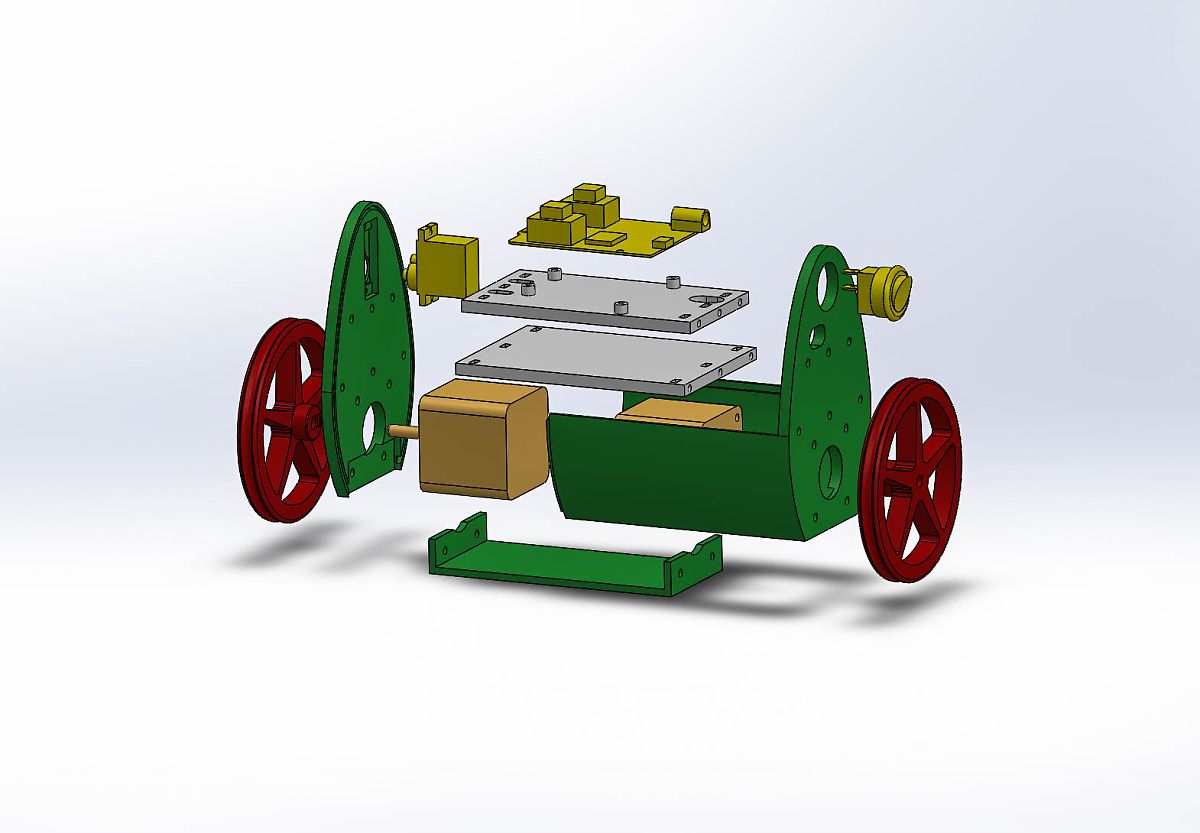
ハードの組上
時間が掛るのは3Dプリンターの印刷のみで、フレームの設計ミスもなく作成できました。
また、購入したコントロールボードを使用したので、ボード作成の手間が省けました。
組み立てるのに夢中でいつも写真を撮るのを忘れます(^_^;)、ほぼ仕上がりの画像です中央の空間はリポ 3S1500mA が入ります。
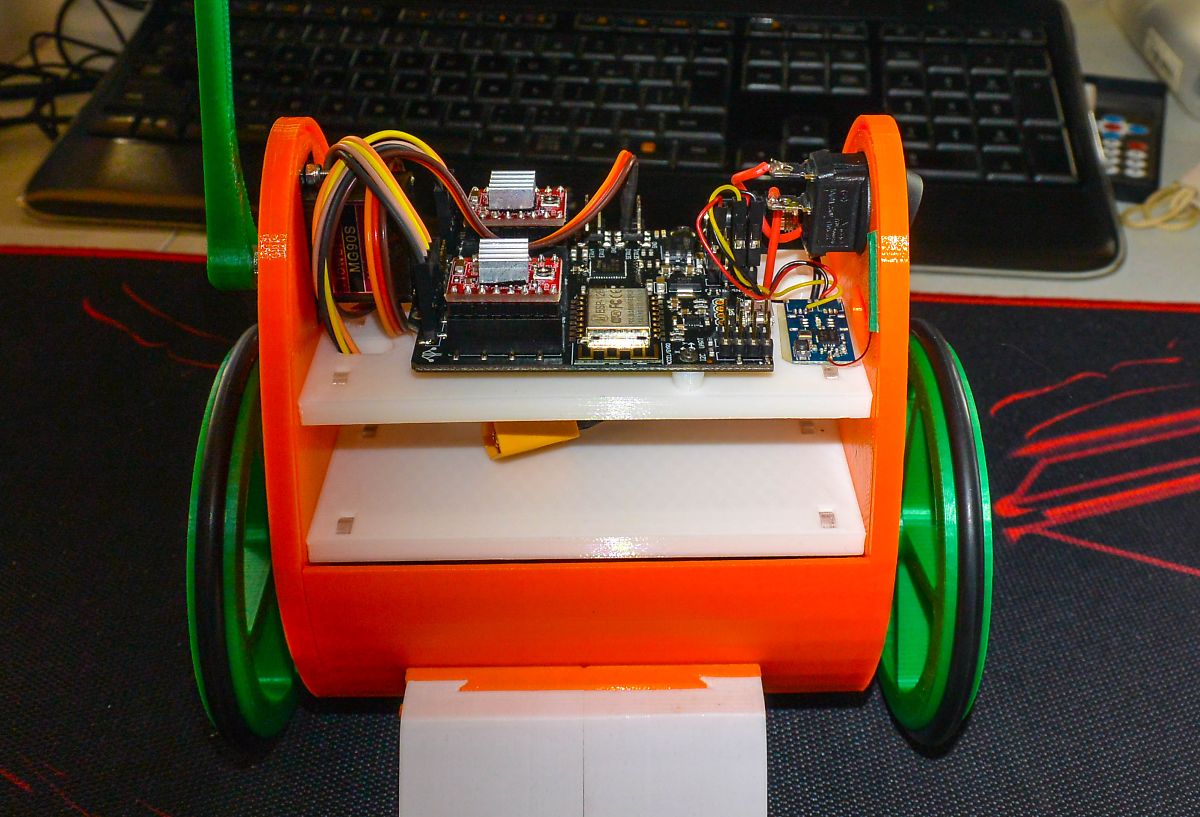
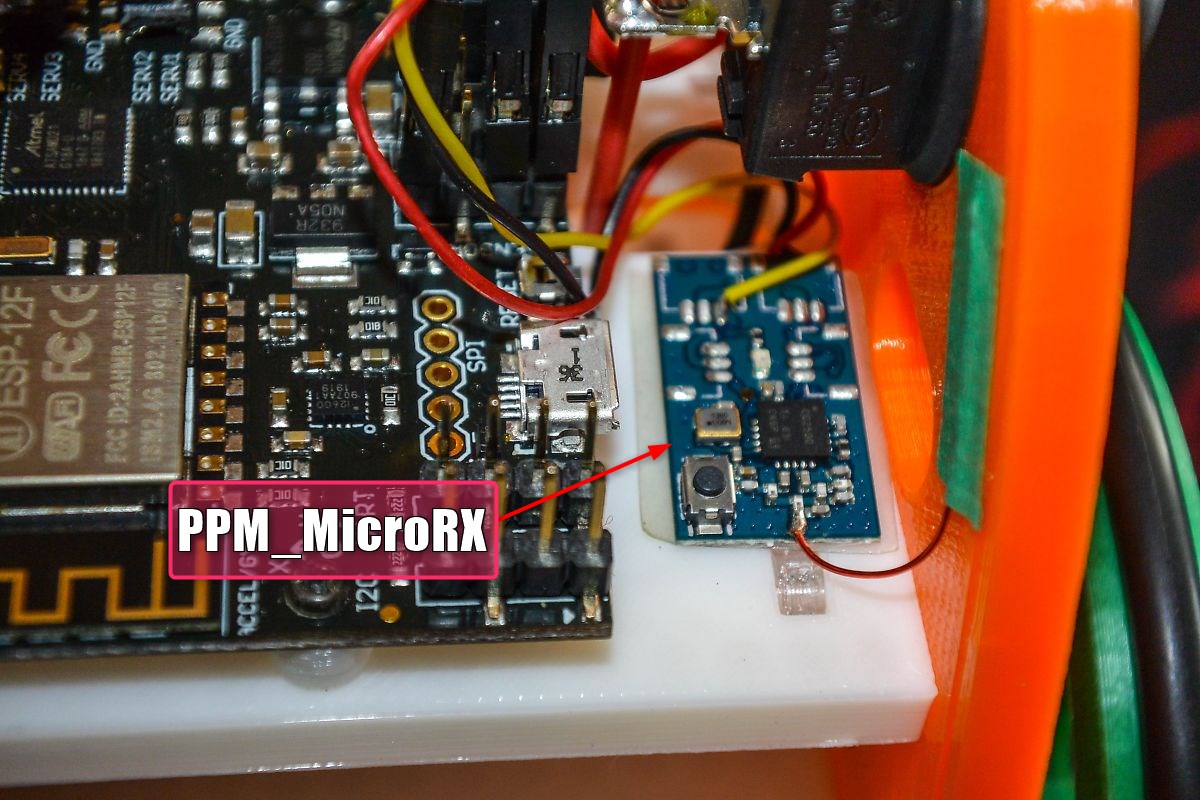
Micro-RXはこの位置に両面テープで貼り付けました、受信機の電源は 1Sの3.7V仕様ですのでコントロールボードの3.3V出力に繋げました、信号線はD13ピンに接続します。
カバーを取付け完成です。

ソフトウエアのインストール
jjrobotsのB-RobotフォーラムにRC仕様にしたB-Robotを投稿された方がいましたので参考にさせて頂きました。
作者のブログです、Github にスケッチも公開されています。
使用するプロポがフタバの14SGなのでスケッチを以下のように修正する必要がありました。
エンコンをエレベーター・ステアリングをラダーに割り当てため cppm_dec2.ino の中の チャンネル2⇒1 に変更しました、
またアームの取付位置を左側にしたのでサーボの動きを(+-) 逆にし、チャンネルを4⇒5(プロポのSGスイッチ)に変更ました、他は変更なしです。
立たせてみました、やはりコントロールするにはプロポが良いですね。
