各種モーターを使用する
2輪 倒立振り子の作成も今回で3回目になります、初回はタミヤのモーターを使ったものでなんとか立ちましたが不安定でダメでした、2度目はローターリーエンコーダー付DCモーターを使用した物でこれはほぼ完璧に立ちましたが、リモートコントロールで躓いています。
残っているモーターは、ステッパーモーター、ブラシレスモーターなどですが今回はステッパーモーターを使用した物に挑戦します。
ステッパーモーター仕様のB-Robot作成
YouTubeなどを見るとステッパーモーターを使用したself balancing robot の動画が数多くアップされています、この中から作成しやすそうな物を2件チョイスしました。
YABR:初心者向けに詳細に説明されており作りやすそうです。
B-ROBOT:JJrobots でキットも発売されています、Githubにフレームのデーターから回路図・スケッチまで公開されていて作りやすそうです、またこれを元に小型化した物を作成した方もおられますので参考になります。
今回は B-ROBOT を参考に作成することにします、専用のAndroidアプリも提供されていてコントロールがしやすいように思えます。
パーツ・仕様
オリジナルのB-ROBOTの仕様と違うところは以下です。
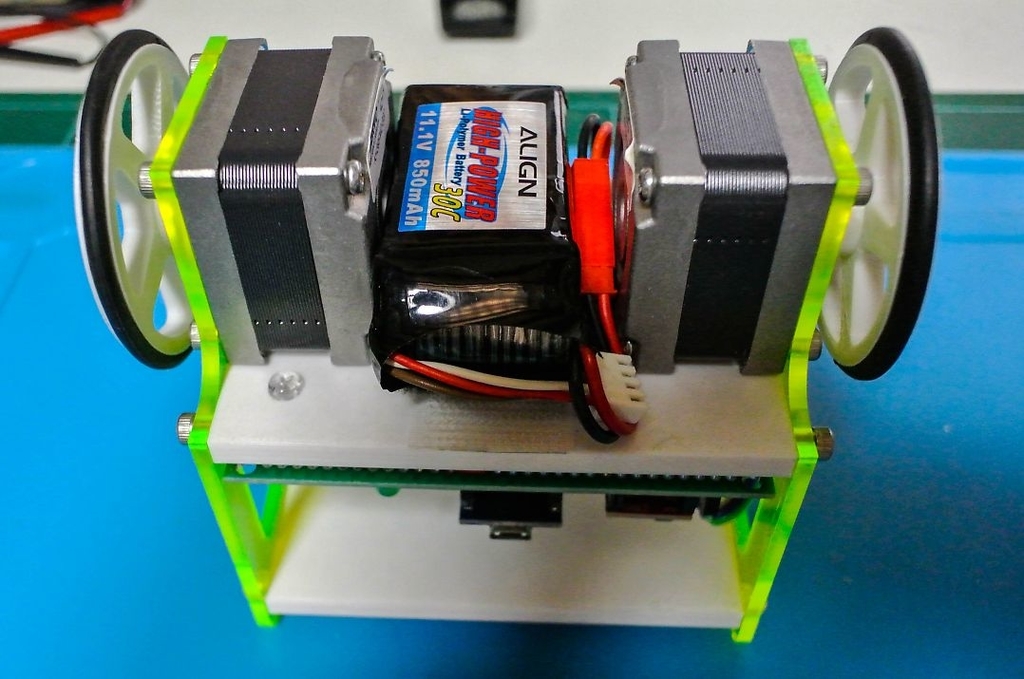
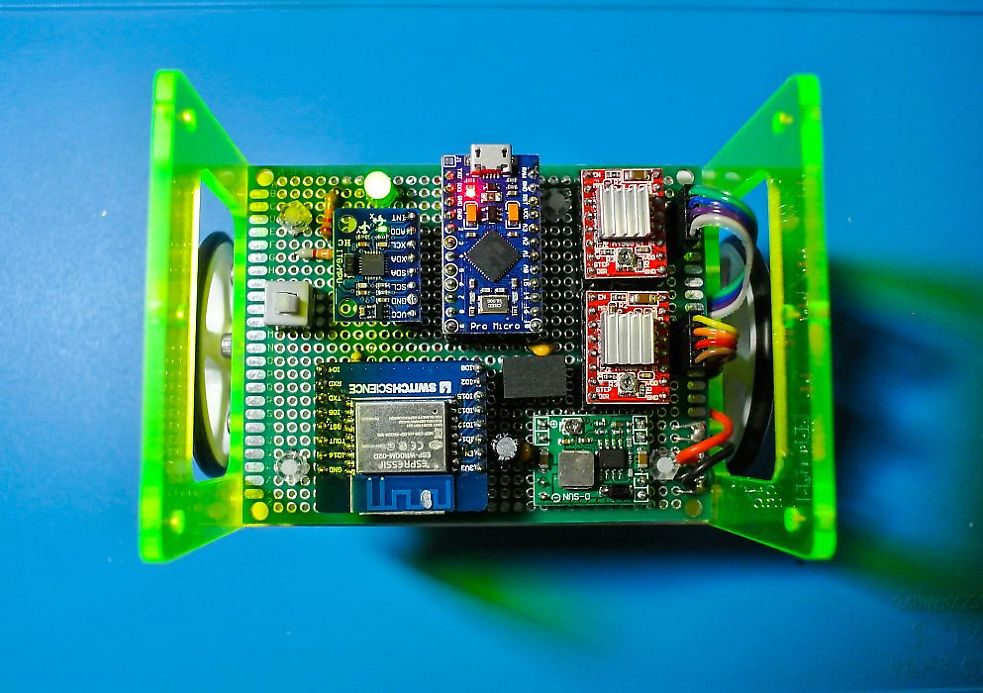
Arduino Leonardo → Arduino ProMicro ステッパーモーター NEMA17 → 中古 日本電産KH39FM2-022
電源 単3(1.2V)6本 → 3Sリポ850mA このため5Vレギュレーター追加
ESP8266 → ESP Wroom-02 技適対応品
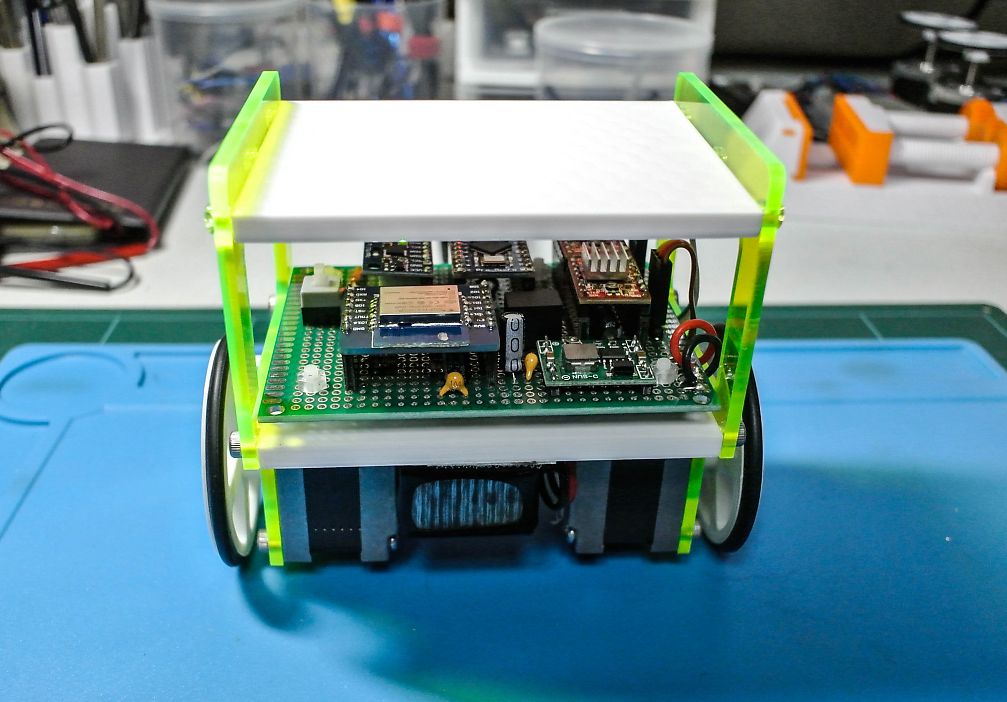
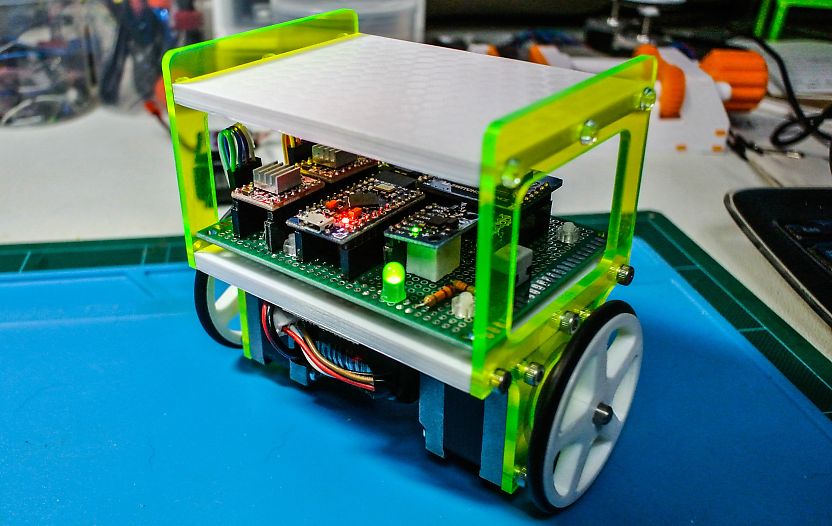
フレームは側面:3mmアクリル板をCNC加工、底板及び天板は3Dプリンターで作成、ホイールは3Dプリンターで作成しOリングを取付けました、サーボは使用しません。
基盤にパーツを配置
90×70mmのユニバーサル基板にパーツを配置し配線しました、パーツの配置を考えればもう少し小さくなりそうです。
プログラムの変更点
B-RBOTを小型化された方を参考にしましたが、ProMicroのD6端子では動作しなかったのでD9端子に変更しました。
バッテリーを3Sリポバッテリーにしたのでリポ電池使用にスケッチを変更
ハマった事
Wroom-02はProMicroからATコマンドで操作されますが、エラーで繋がらない事象が発生しました、配線チェックしても問題なく原因が分からずハマりました。
ネットで色々調べた結果分かったことは、「一度プログラムを書き込んだESP8266はATコマンドを使用出来ない」と言うことでした、確かにWroom-02にプログラムを書き込んだ物を使用していました。
ATコマンドを再度使えるようにするにはファームウエアを書き込む必要があるようです、ここの記事を参考にファームウエアを最新の物に書き換えてATコマンドが使えるようになりました。(^_^;)
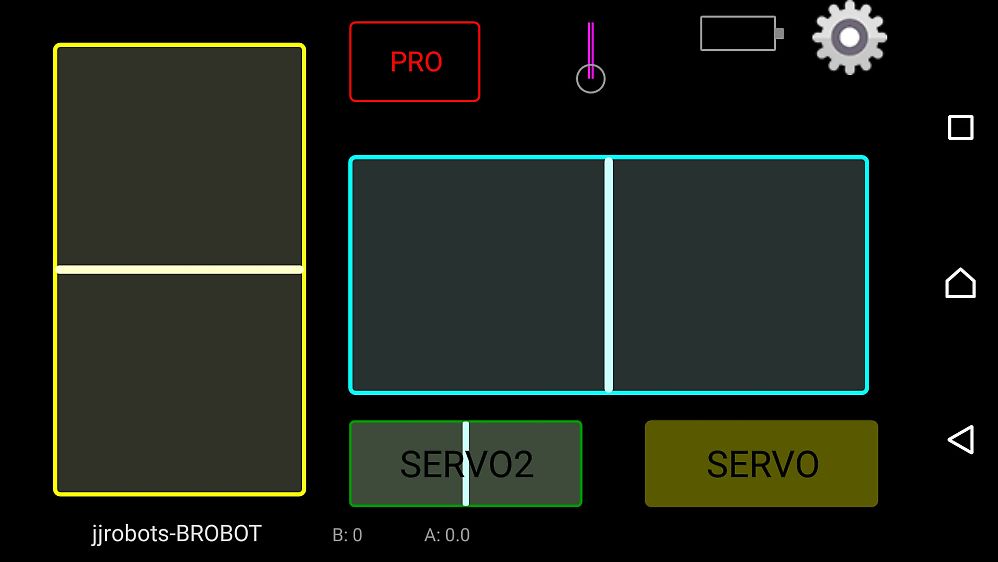
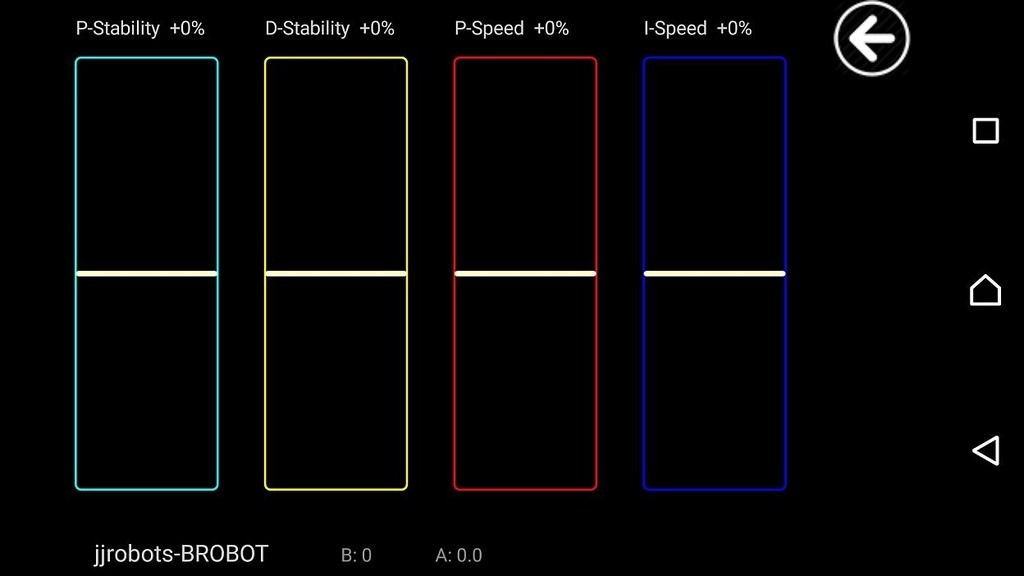
AndroidスマフォのAPPでコントロール
スマフォのAPP JJrobots control APP をインストールすればスマフォでB-ROBOTをコントロールできます、またPIDの調整もスマフォで出来ますので便利です。
完 成
バッテリーは当初上部に置きましたが不安定だったので現在の位置に移動しました、パーツの配置密度を上げて基板を小さくすればもっとスマートになったでしょうが、ちょっと頭でっかちで不格好です。