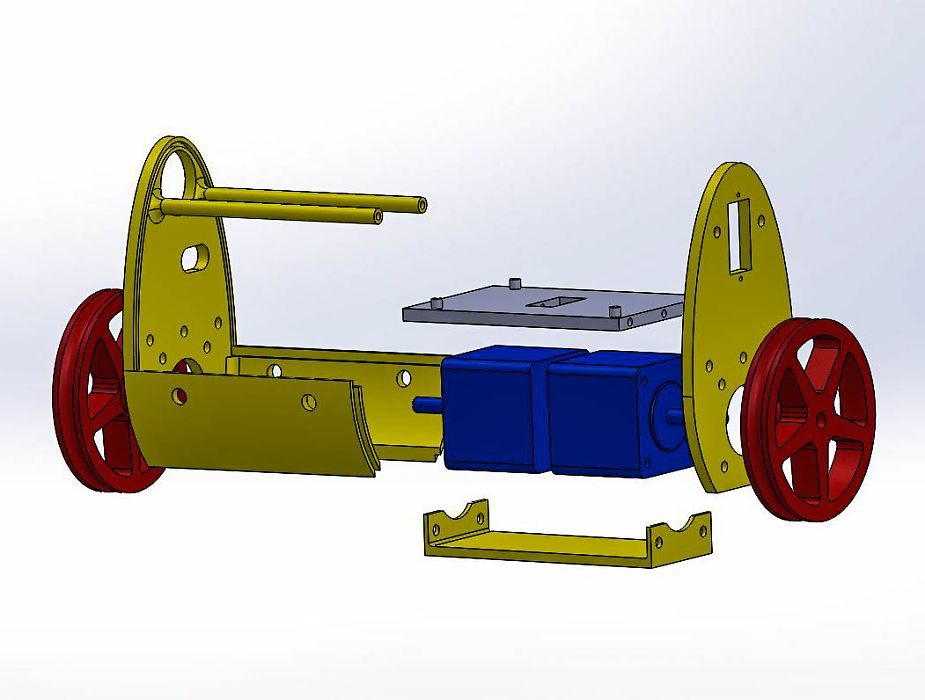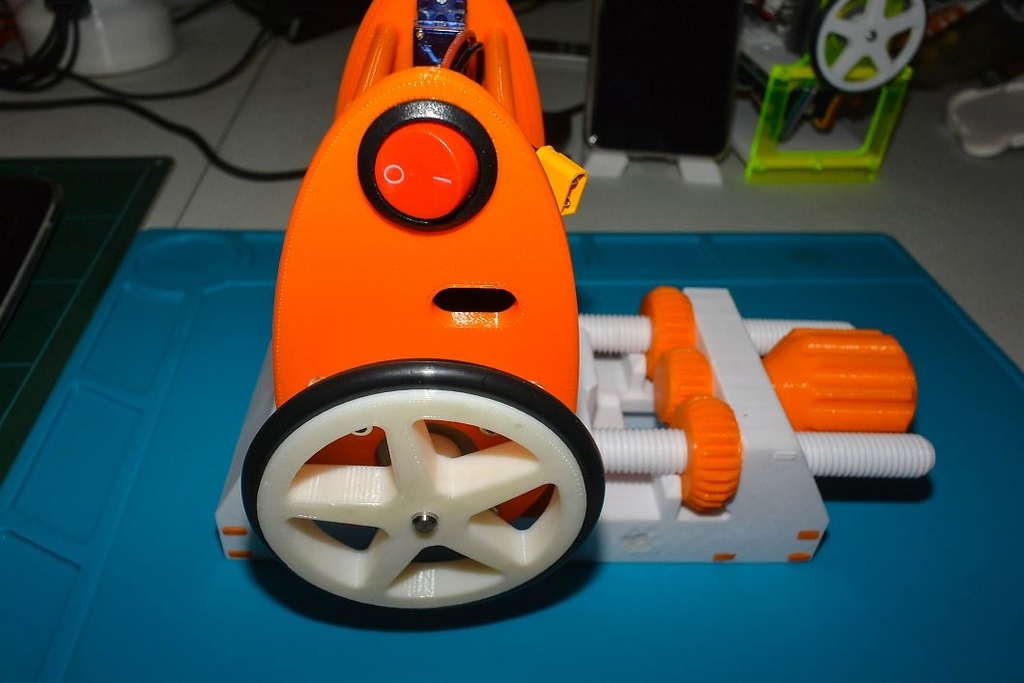
前回の記事ででハード面の作成を行いましたので、続いてソフトウエアのインストールを行い完成させます。
スケッチの書込み
B-Robot forum で投稿されている ghmartin77 の記事にGithub へのリンクがありますのでZip ファイルをダウンロードします、また不具合などの対処もフォーラム内で議論されていますので最後まで目を通して下さい。
書込みには Arduino IDE を使用しますので使用したことがある方が対象です、使用方法はネット上に山ほどありますのでここでは省きます。
ESP32のライブラリが必要です。
また、Arduino IDEのバージョンがVer1.8.7ではコンパイル時にエラーが出ましたのでベーター版のVer1.9.0を使用しました。
まずGithubからダウンロードしたZipファイルを解凍し、出来たフォルダーの中の「BRobotEvo2ESP32」フォルダーをArduinoで使用するフォルダー(通常ドキュメント内のAruduinoフォルダー)に移動します、フォルダー内にファイルが14個ありますが「BRobotEvo2ESP32.ino」は中身はメッセージだけなので削除し、「ESP32SelfbalancingBot.CPP」ファイルを「ESP32SelfbalancingBot.ino」にリネームします。
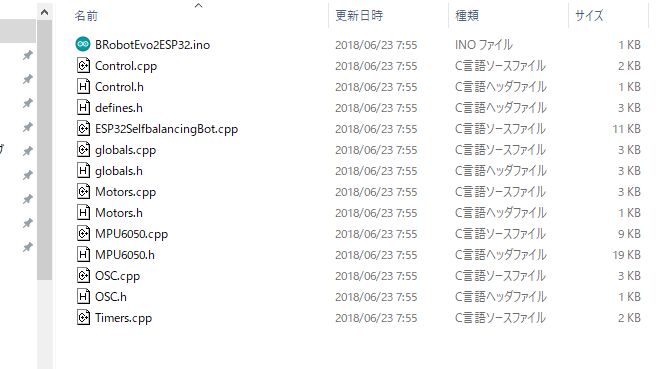
その他、フォーラムに書かれている不具合箇所の修正などがありますが、どのファイルを修正したのか覚えておりませんので、この3号機用に修正したファイルをまとめてZipファイルにしたのでアップしておきます。
スケッチを書き込む前に不要動作防止のため、サーボコネクターと電池は外しておきます。
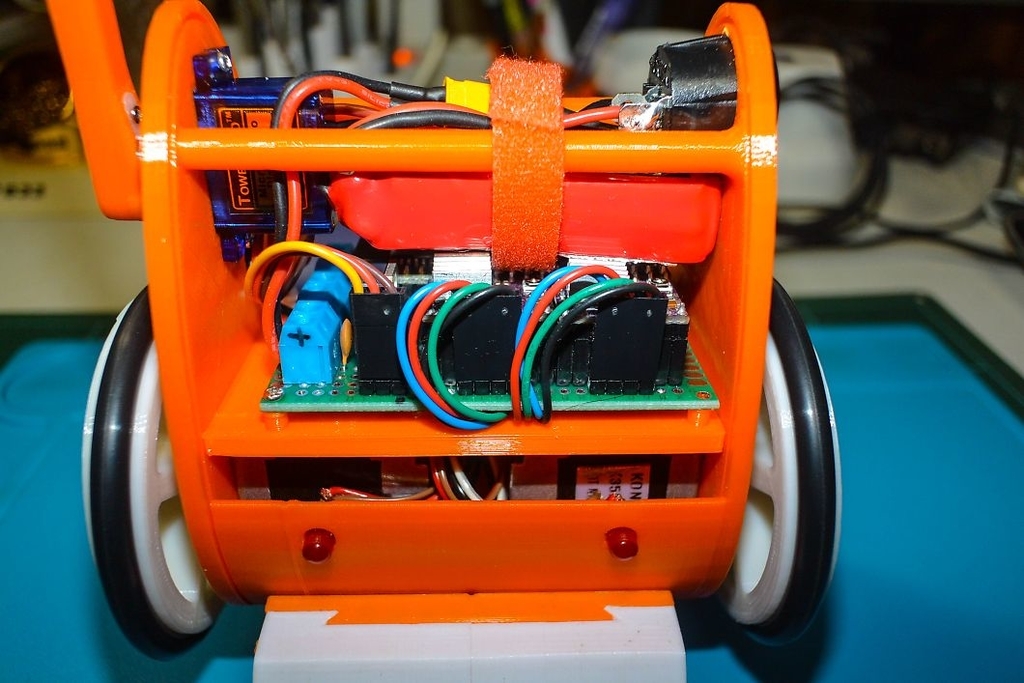
ステッパーモータードライバーの電流値調整
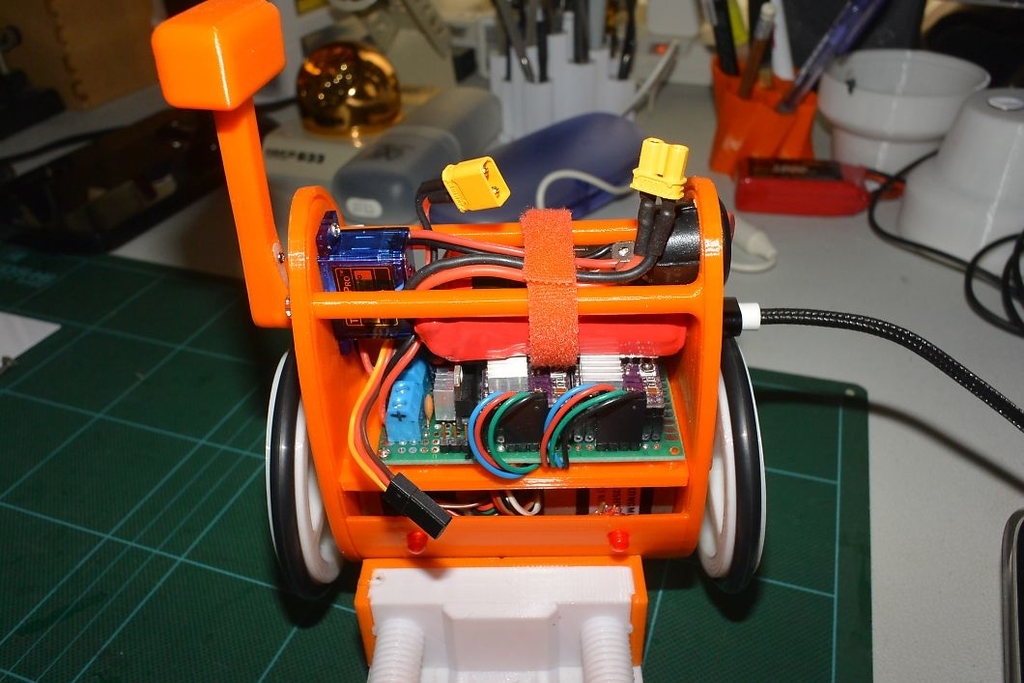
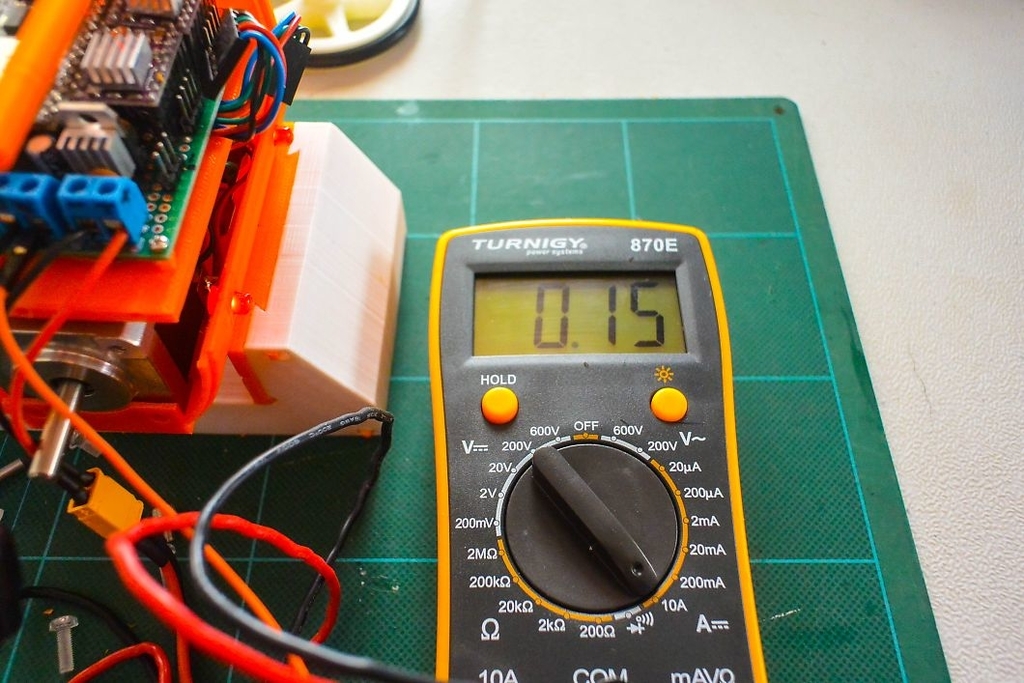
書込みが無事終了したらステッパーモータードライバーの電流値を調整します、まずサーボ、左右のステッパーモーターのコネクターを外した状態で電流値を測定しますこのロボットの場合150mA程度流れています。
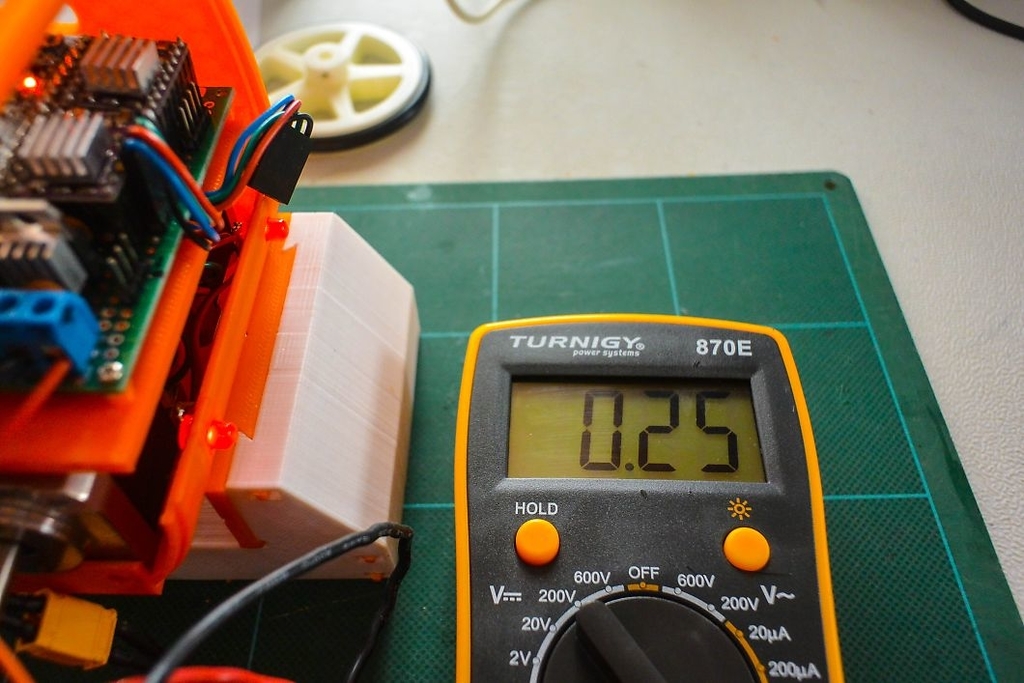
いったん電源を落とし片方のステッパーモーターを接続し電源を入れステッパーモーターが動作したときの電流値を250mA程度にドライバーモジュール上のボリュームで調整します、もう片方も同様に調整します。
この電流値で私の場合ちょうど良い感じでしたが、個体差があるかもしれないので実際に動作させてみて調整した方がよいでしょう、調整が済んだら全てのコネクターを接続し寝かせた状態で電源を入れます、暫くすると車輪が少し動きます、動きが止まったら車体をゆっくり持ち上げると立ち上がります。
スマートフォンでのコントロール
jjrobotsでAndroid 及び iOS 用にアプリを公開しています、私はAndroidスマフォを使用していますのでGoogle Play よりアプリをインストールしました。
B-Robotの電源を入れるとスマフォのWiFi設定一覧に「Bbot」が表示されますので選択しパスワード「12345678」を入力して接続します。
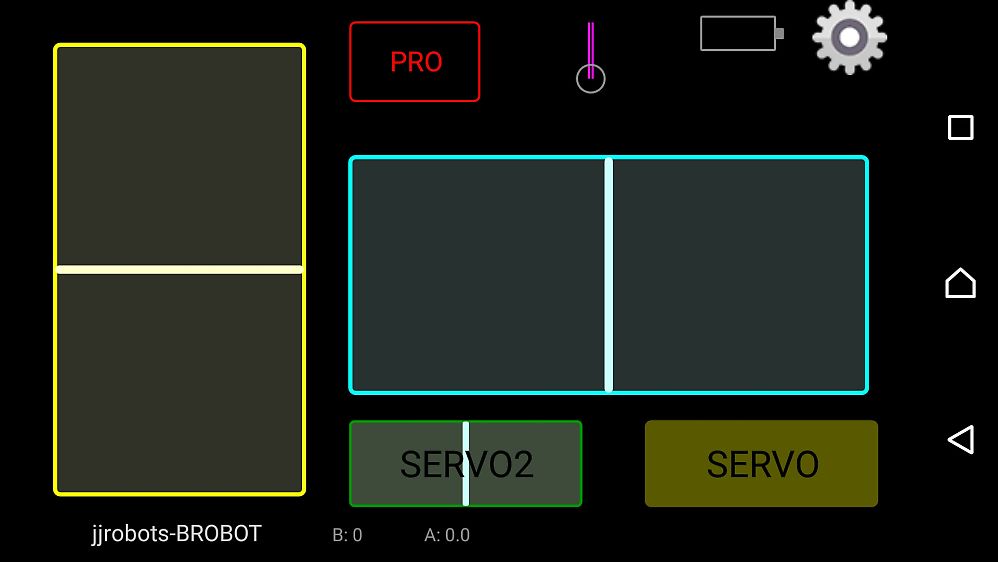
アプリを立ち上げ「B-ROBOT EVO2」を選択してコントロールします。
サーボは右側のボタンで操作、設定画面ではPIDの調整がスマフォから行えます。


※注意点
ロボットを立たせている時にスマフォを接続すると、一瞬動作がストップしロボットが倒れますので、ロボットを倒した状態でスマフォをWiFi接続し、スマフォでコントロール出来るようにしてからロボットを立たせます。