最近所用で忙しく、ブログの更新が出来ていない状況が続いています。
そんな中 はてなブログから、1ヶ月記事が投稿されていないので何か書けのようなメールが届きました、大きなお世話って言いたいところですが文句を言っても仕方ないので記事を書きます。
CADを使う上で便利な3Dマウスを使っています2年ぐらい前に記事にしていますが、この3Dマウスは頻繁に使う物ではないのでいつも机の片隅で埃まみれになっています。
この3Dマウス用のケースを作成して埃まみれから解放しようという間に合わせな記事です。(^_^;)
使用している3Dマウスです、高価なので程度の良い中古品を購入しました。
 SNSE")
3Dconnexion 3Dマウス SpaceNavigator SE (Standard Edition) SNSE
- 出版社/メーカー: 3D Connexion
- 発売日: 2006/12/08
- メディア: Personal Computers
- 購入: 4人 クリック: 140回
- この商品を含むブログ (19件) を見る
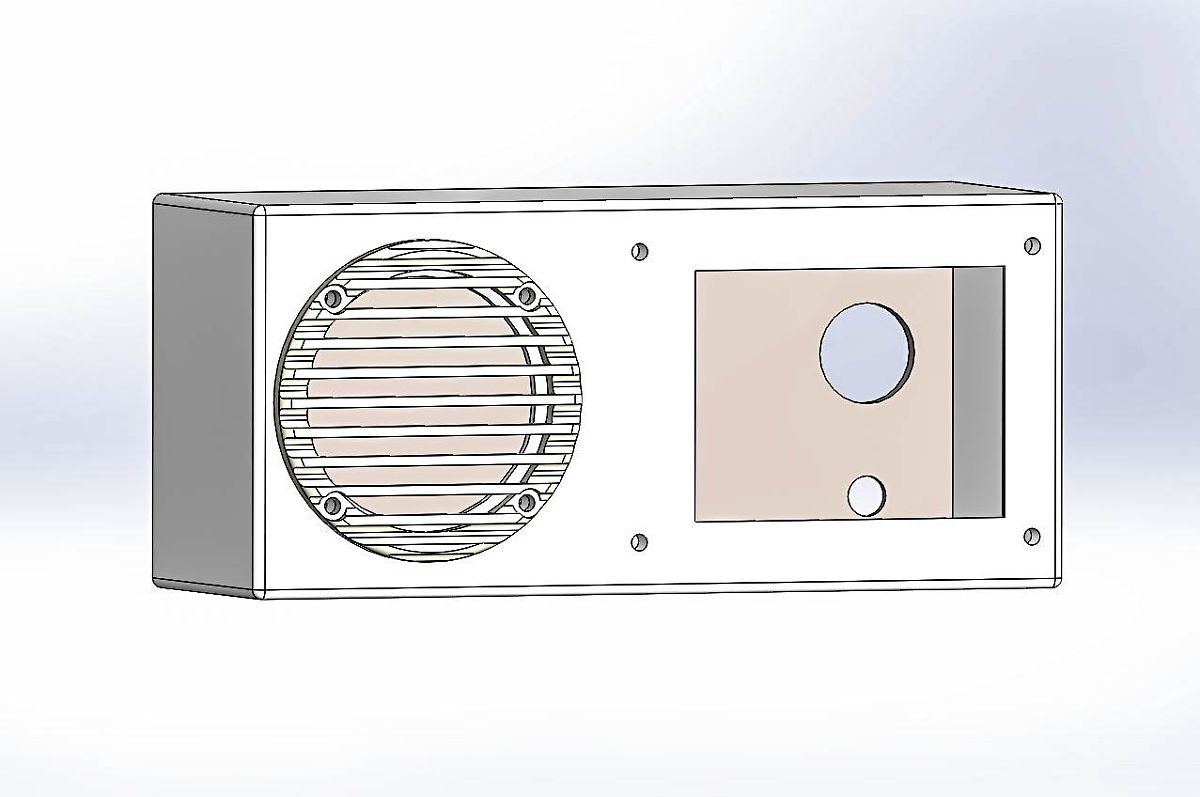
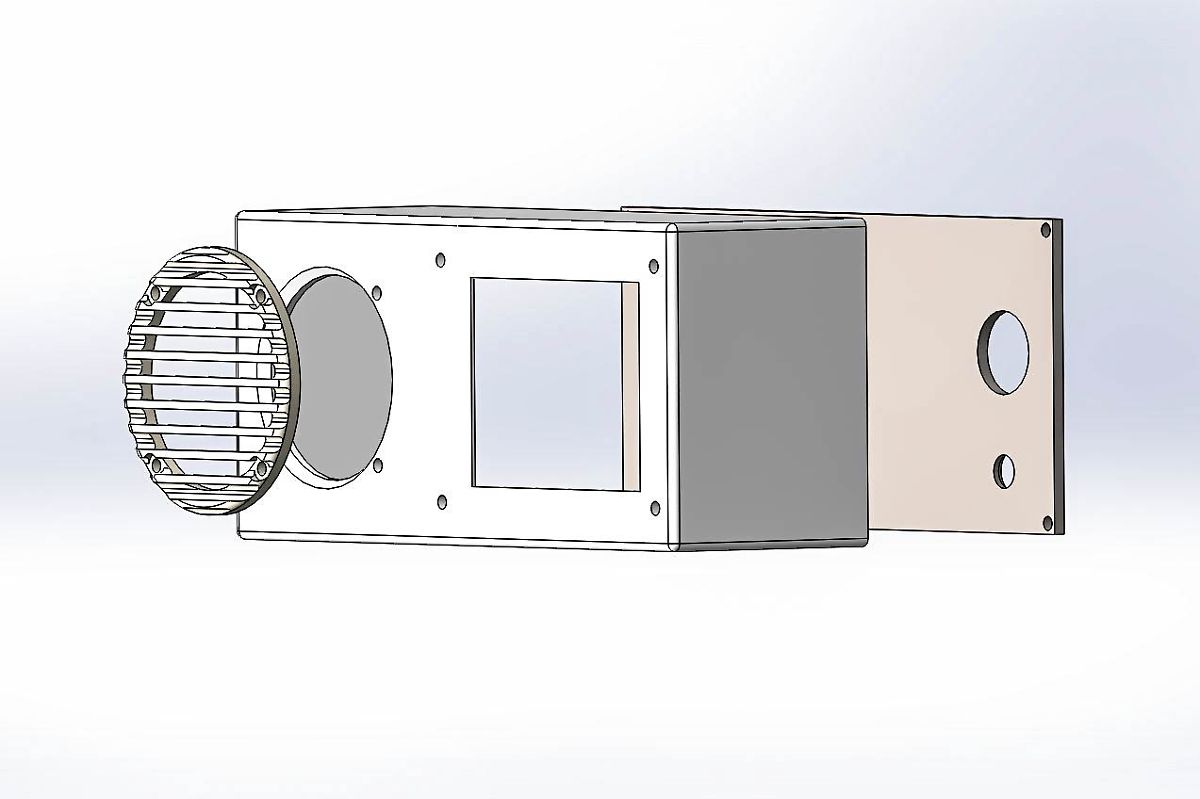
このマウスが入るようにCADで適当にケースを設計、3Dプリンターで印刷しました。


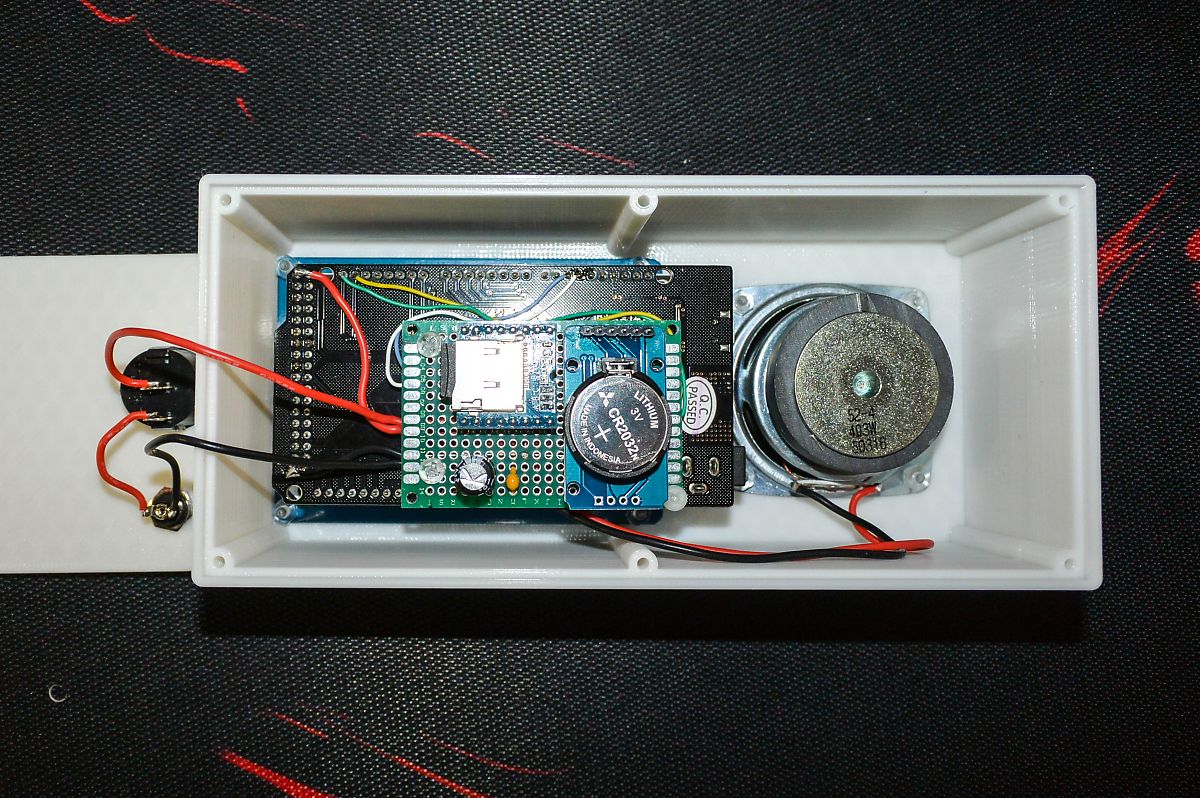
出来上がったケースです。


3Dマウスは普通のマウスと違い本体を動かすことはしませんが、USB接続用ケーブルが長く邪魔になります、コードレスタイプがあるのでしょうか?


")
















![HiLetgo 5個セットPAM8403 ミニ 5V デジタル アンプ基板 USB 電源 オーディオ アンプ [並行輸入品]](https://m.media-amazon.com/images/I/51rVq+X-ioL.jpg "HiLetgo 5個セットPAM8403 ミニ 5V デジタル アンプ基板 USB 電源 オーディオ アンプ [並行輸入品]")
![小型 スピーカーユニット2インチ(50mm) 4Ω/3W [スピーカー自作/DIYオーディオ]/1個](https://m.media-amazon.com/images/I/31Sw6yTRlQL.jpg "小型 スピーカーユニット2インチ(50mm) 4Ω/3W [スピーカー自作/DIYオーディオ]/1個")
")
")











")





")

![NEWバーション UNO R3 ATmega328P USB CH340G Arduinoと互換性 + USB ケーブル(2個セット) [並行輸入品]](https://m.media-amazon.com/images/I/51R7Oh3BbWL._SL500_.jpg "NEWバーション UNO R3 ATmega328P USB CH340G Arduinoと互換性 + USB ケーブル(2個セット) [並行輸入品]")
")

")
![HiLetgo 3個セット HY-SRF05超音波距離センサモジュール測定センサモジュール Arduinoに互換 [並行輸入品]](https://m.media-amazon.com/images/I/51BAamWWNkL._SL500_.jpg "HiLetgo 3個セット HY-SRF05超音波距離センサモジュール測定センサモジュール Arduinoに互換 [並行輸入品]")